Mô tả sản phẩm
KSMIT3: Một hệ thống tiêu đề và tham chiếu thái độ tự chủ
KSMIT3 là một hệ thống tiêu đề và tham chiếu thái độ hiện đại, được cung cấp dưới dạng một mô-đun độc lập đầy đủ chức năng.mà làm cho nó dễ dàng để tích hợp vào bất kỳ hệ thống.
Hệ thống sáng tạo này tự hào có một giao thức truyền thông đầy đủ tài liệu và tiêu chuẩn công nghiệp, cho phép tùy chỉnh các tin nhắn dữ liệu về tần số, định dạng đầu ra và dữ liệu.Các tín hiệu được xử lý hoàn toàn trên bảngTính năng này làm cho KSMIT3 lý tưởng để sử dụng trong môi trường hoạt động MCU đơn giản.
KSMIT3 có độ chính xác cao trong điều kiện động với độ chính xác lật và ném 1 độ RMS, cũng như độ chính xác lệch 2 độ RMS.làm cho nó hoàn hảo để sử dụng trong kiểm soát và ổn định bất kỳ đối tượng hoặc điều hướng, như máy bay không người lái.
Đặc điểm
● AHRS hiệu suất đầy đủ trên các module 12,1 x 12,1 mm
● Độ chính xác Flip/PITch (dinamic) 1,0 độ
● Độ chính xác hướng đi 2,0 độ
● Nhu cầu cực kỳ thấp đối với bộ xử lý chính
● Giao diện thống nhất cho toàn bộ vòng đời sản phẩm
● Năng lượng thấp (45 mW ở 3.0V)
● Tương thích với PLCC28 PCB (12.1 x 12.1 x 2.6 mm)
Các thông số kỹ thuật
| Đề mục |
Các tham số (giá trị điển hình) |
| TÍNH ĐƯỜNG Đúng lúc |
Độ chính xác Yaw (dinamic) |
2 độ (rms) |
| Độ chính xác cuộn / pitch (dinamic) |
1 độ (rms) |
| Máy quay |
Toàn quy mô |
± 2000°/s |
| Sự ổn định thiên vị trong quá trình chạy |
10°/h |
| Không tuyến tính |
00,1% |
| Sự thay đổi yếu tố quy mô |
0.05% |
| G-SENSITIVITY |
0.1°/s/g |
| Mật độ tiếng ồn |
0.01o/s/√Hz |
| băng thông (-3dB) |
180Hz |
| Các máy đo tốc độ |
Toàn quy mô |
±16g |
| Sự ổn định thiên vị trong quá trình chạy |
0.1mg |
| Không tuyến tính |
00,5% |
| Sự thay đổi yếu tố quy mô |
0.05% |
| Mật độ tiếng ồn |
200 μg/√Hz |
| băng thông (-3dB) |
180 |
| Magnetometer |
Toàn quy mô |
6 gauss |
| Không tuyến tính |
00,1% |
| Nghị quyết |
120ugauss |
| Tiếng ồn (rms) |
50ugauss |
| Giao diện |
Điện áp cung cấp |
3.3v DC |
| liên lạc cổng hàng loạt |
TTL |
| Tần số đầu ra |
Tỷ lệ baud 100hz@230400 |
Khung tham chiếu
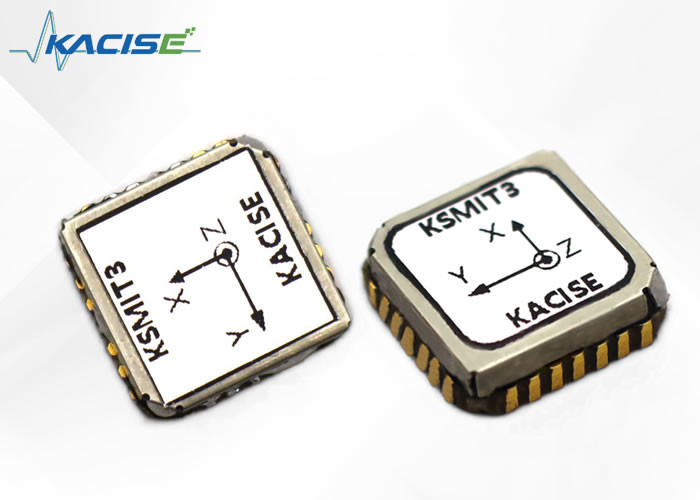
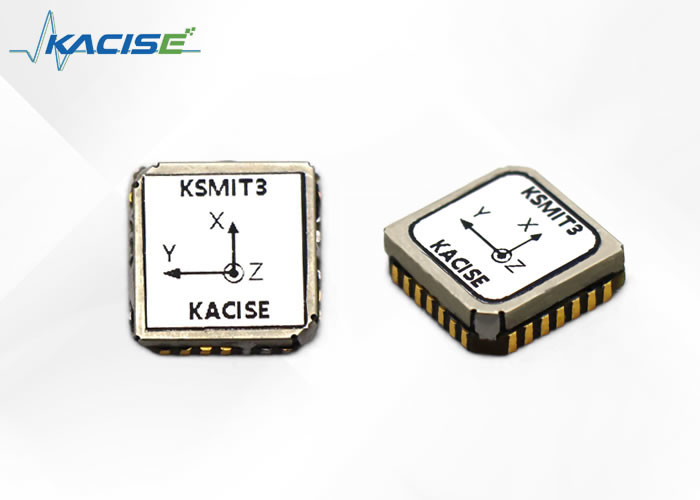
KSMIT3 sử dụng hệ thống tọa độ cánh phải và khung cảm biến mặc định được xác định như được hiển thị trong hình 13.tham khảo hướng dẫn tích hợp phần cứngMột số đầu ra dữ liệu được sử dụng phổ biến với hệ thống tọa độ tham chiếu đầu ra của họ được liệt kê trong Hình 1.
 Hình 1 Hệ thống tọa độ cố định cảm biến mặc định cho KSMIT3
Hình 1 Hệ thống tọa độ cố định cảm biến mặc định cho KSMIT3
Giao thức liên lạc người dùng
Tỷ lệ baud là 115200bps, 230400bps và 460800bps. Dữ liệu bit 8, dừng bit 1, không kiểm tra bit. Byte cao đi trước và byte thấp đi sau. Tần số cập nhật dữ liệu f=100Hz.Tỷ lệ baud mặc định là 230400bps.
| Số lượng Byte |
Tên |
Loại byte |
Trọng đại.-cation |
Phạm vi |
KhôngIT |
Mô tả |
| 1~2 |
Frame Header |
U,2 |
|
|
|
0XAA 71 |
| 3 |
Số định dạng khung hình |
Giá trị cố định 3=0x03 |
| 4 |
Chiều dài khung thông tin liên lạc |
Giá trị cố định 100=0x64 |
| 5~13 |
Gyro |
S,3*3 |
1e-4 |
± 838.8608 |
°/s |
X/Y/Z bên phải/Trước/Trên |
| 14~22 |
Acc |
S,3*3 |
1e-5 |
± 83.88608 |
g |
X/Y/Z bên phải/Trước/Trên |
| 23~28 |
Magn |
S,3*2 |
1e-2 |
± 327.68 |
uT |
X/Y/Z bên phải/Trước/Trên |
| 29~31 |
Hbar |
S1*3 |
1e-2 |
±83886.08 |
mbar |
Barometer |
| 32 |
Quốc kỳ |
U,1 |
|
|
|
BIT1-Magnetic Valid Mark 1- Valid
BIT2-Barometric Valid Flag 1- Valid
BIT3- GPS_exist
GPS thông tin ra ngoài hoặc không
0- Không có thông tin GPS
1- Thông tin GPS có sẵn
Thông tin BIT4-GPS hiệu quả Flag 1- Valid
BIT5-8 Không điền
|
| 33~40 |
Hệ thống từ được lưu trữ |
|
|
|
|
|
| 41~49 |
GPS_Vele/N/U |
S,3*3 |
1e-4 |
± 838.8608 |
m/s |
GPS Đông/Bắc/Tốc độ trên bầu trời |
| 50~60 |
GPS_Lon/Lan |
S2*4 |
1e-7 |
± 214.7483648 |
° |
GPS Longitude/GPS Latitude |
| GPS_Hmsl |
S1*3 |
1e-2 |
±83886.08 |
m |
GPS AltITude |
| 61~62 |
GPS_Headmot |
S1*2 |
1e-2 8 |
± 327.6 |
° |
Định hướng GPS |
| 63 |
GPS_Status |
U,1 |
|
|
|
BIT1~4-Số vệ tinh định vị GPS (tối đa 15)
BIT5 -GPS Positioning Mark 1 hợp lệ
BIT6~8- Loại định vị GPS
GPS_ Fixtype
0x00=Không sửa
0x01=Chỉ tính toán chết
0x02=2d sửa
0x03=3d-Fix
0x04=Gnss + nhận chết kết hợp
0x05=Chỉ sửa thời gian
|
| 64~65 |
GPS_Pdop |
U,2 |
1e-2 |
|
|
|
| 66~71 |
Ins_Att |
S,2*2 |
1e-2 |
± 327.68 |
° |
Ptich ± 90° Roll ± 180° |
| S1*2 |
655.36 |
° |
Quay ± 180° |
| 72~80 |
Vn |
S,3*3 |
1e-4 |
± 838.8608 |
m/s |
Vel_E/N/U |
| 81~89 |
Pos |
S2*4 |
1e-7 |
± 214.7483648 |
° |
LongITude/ LatITude |
| S1*3 |
1e-2 |
±83886.08 |
m |
AltITude |
| 92 |
Phong cách và kịch bản |
U,1 |
|
|
|
BIT1~4- Chế độ làm việc
Align=1; Ins=2; Ahrs=3; Vg=4
BIT5~8- Kịch bản làm việc
1=Trên máy bay;2=Trên nhà;3=Trên máy bay 4=Phía cố định;5=Rotor
|
| 93~96 |
Dự trữ |
|
|
|
|
Null Fill |
| 97~98 |
Nhiệt độ |
S,2 |
1e-2 |
± 327.68 |
°C |
|
| 99 |
Đếm đi |
U,1 |
|
|
|
|
| 100 |
Mã kiểm tra |
|
|
|
|
Tổng hợp tất cả các ký tự trước khi kiểm tra BIT |
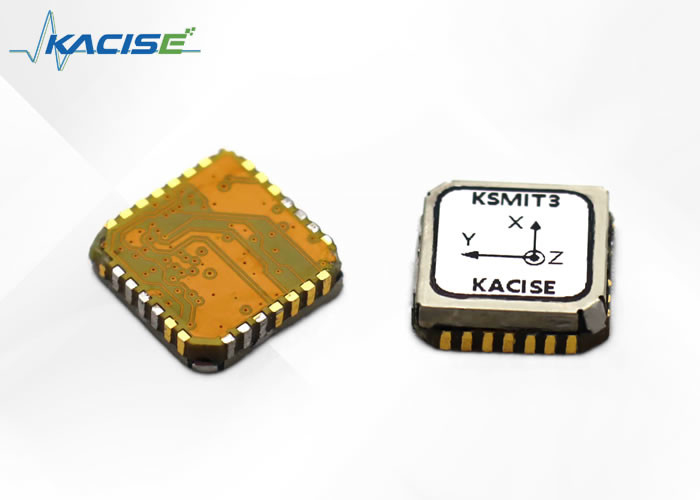
Cấu hình pin
Hình 2: Cấu hình chân của mô-đun KSMIT3 (nhìn trên)
| Số |
Tên |
Loại |
Mô tả |
| 7 |
VDDIO |
Sức mạnh |
Điện áp cung cấp số |
| 8 |
GND |
| 23 |
UART_RX |
Giao diện UART |
Nhập dữ liệu máy thu |
| 24 |
UART_TX |
Giao diện UART |
Phát ra dữ liệu của máy phát |
| 25 |
GND |
| 18 |
AUX_RX A |
Giao diện GNSS phụ trợ |
Nhập dữ liệu từ module GNSS |
| 19 |
UX_TX |
Giao diện GNSS phụ trợ |
Dẫn ra dữ liệu từ máy phát cho mô-đun GNSS |
| 20 |
SYNC_PPS |
Giao diện GNSS phụ trợ |
Nhịp đập mỗi giây từ đầu vào từ module GNSS |
Cài đặt tham số
Sản phẩm mặc định vào trạng thái "output liên tục" khi bật, và để thiết lập tham số, lệnh "stop output" phải được gửi trước.người dùng phải bật và khởi động lại để tự động chuyển sang trạng thái truyền liên tục.
1 Khóa đầu ra
Ngừng đầu ra là để chuyển từ trạng thái mặc định "output liên tục" vào trạng thái "parameter setting".
Gửi đến: * PA không gian GS01 không gian STOP xe trở lại
Trả lời:
* PA không gian GS01 không gian STOP không gian 0 xe trở lại thất bại
* PA không gian GS01 không gian STOP không gian 1 xe ngựa trở lại thành công
2 Thiết lập kịch bản làm việc
Sản phẩm cần chuyển đổi các thông số bộ lọc theo các kịch bản ứng dụng khác nhau.với kịch bản mặc định trên máy bay cho năng lượng.
Chuyển cảnh là để chuyển mặc định "cảnh xe hơi" khi bật vào cảnh thực tế.
Gửi: * PA không gian GS01 không gian SCENES không gian 1 xe ngựa trở lại
Trả lời:
* PA không gian GS01 không gian SCENES không gian 1 không gian 0 xe trở lại thất bại
* PA không gian GS01 không gian SCENES không gian 1 không gian 1 xe ngựa trở lại thành công
Lưu ý: Các ký tự được nhấn mạnh bao gồm 1- gắn xe hơi, 2- trong nhà, 3- gắn tàu, 4- cánh cố định, và 5- rotor tùy chọn.
3 Đặt tỷ lệ Baud
Tỷ lệ baud mặc định để bật là 230400bps, có thể được chuyển bằng cách gửi lệnh.
Gửi: * PA không gian GS01 không gian BAUD không gian 1 xe trở lại
Trả lời:
* PA không gian GS01 không gian BAUD không gian 1 không gian 0 xe trở lại thất bại
* PA không gian GS01 không gian BAUD không gian 1 không gian 1 xe ngựa trở lại thành công
Lưu ý: Nội dung của các ký tự gạch dưới là 1-115200bps, 2-230400bps và 3-460800bps, là tùy chọn.
4 Khôi phục cài đặt nhà máy
Khôi phục cài đặt nhà máy liên quan đến việc đặt cảnh làm việc, định dạng khung hình, tốc độ baud, suy giảm từ tính và hiệu chuẩn trường từ tính theo giá trị mặc định.
Gửi: * PA không gian GS01 không gian RESET xe trở lại
Trả lời:
* PA không gian GS01 không gian RESET không gian 0 xe trở lại thất bại
* PA không gian GS01 không gian RESET không gian 1 xe trở lại thành công
5 Đặt góc suy giảm từ tính
Sự suy giảm từ tính mặc định là 0, với từ tính dương về phía đông bắc và từ tính âm về phía tây.
Gửi: * PA không gian GS01 không gian MDEC không gian +/- XX.XX xe trở lại
Trả lời:
* PA không gian GS01 không gian MDEC không gian 0 xe trở lại thất bại
* PA không gian GS01 không gian MDEC không gian 1 xe trở lại thành công
Lưu ý: Nếu góc suy giảm từ tính là -2,5 độ, chuỗi nhấn mạnh là -02.50; Nếu góc suy giảm từ tính là +1,5 độ, chuỗi miêu tả là +01.50.
6 Kiểm tra từ trường
Trong hoạt động của các cảm biến từ tính, IT không thể tránh khỏi bị ảnh hưởng bởi sự can thiệp của các trường điện từ xung quanh,có thể dẫn đến độ lệch và biến dạng khác nhau của trục XYZ cường độ từ trường được đo bằng cảm biến từ. Chuẩn đoán từ trường là để bù đắp cho nhiễu từ mềm và cứng thông qua algoritm học tập của môi trường từ trường xung quanh.chúng tôi khuyên bạn nên thực hiện hiệu chuẩn trường từ sau mỗi lần lắp đặt và sau khi thay đổi môi trường trường từ.
Khi thực hiện hiệu chuẩn trường từ, các chất can thiệp xung quanh nên không thay đổi (tức làxoay với sản phẩm) trong quá trình xoay sản phẩm và vị trí tương đối của sản phẩm. Định chuẩn đòi hỏi người vận hành không có điện thoại di động, thẻ từ tính, chìa khóa, hoặc kim loại hoặc các thiết bị chạy có thể ảnh hưởng đến trường điện từ trên cơ thể của họ.
Chú ý: Chỉ trong phạm vi nhiễu giới hạn, hoạt động hiệu chuẩn trường từ có thể có hiệu ứng bù đắp.Phạm vi của cảm biến từ tính là khoảng giữa cộng và trừ 1 GaussNếu giá trị can thiệp từ trường vượt quá cộng hoặc trừ 0,5 Gauss, máy đo từ có thể đạt trạng thái bão hòa,cản trở hiệu ứng bù đắp. Khi hiệu chuẩn thất bại, IT cho biết vấn đề đã xảy ra.
Kiểm tra 2D
Lưu ý: Khi sản phẩm không thể quay trong 3D, hiệu chuẩn 2D có thể được sử dụng.2D hiệu chuẩn có thể được hoàn thành thông qua giao diện hoặc cổng hàng loạt bằng cách phát lệnh.
1. Bắt đầu hiệu chuẩn: Trước khi hiệu chuẩn người dùng, gửi
Gửi: * PA không gian GS01 không gian MCAL không gian START xe trở lại
Trả lời:
* PA không gian GS01 không gian MCAL không gian START không gian 0 xe trở lại thất bại
* PA không gian GS01 không gian MCAL không gian START không gian 1 xe trở lại thành công
2 Dừng hiệu chuẩn: Bắt đầu xoay ngang trong hơn 2 vòng, và gửi sau khi hoàn thành
Gửi: * PA không gian GS01 không gian MCAL không gian END xe trở lại
Trả lời:
* PA không gian GS01 không gian MCAL không gian 0 xe trở lại thất bại
* PA không gian GS01 không gian MCAL không gian 1 không gian X: x.xx không gian Y: y.yy xe trở lại thành công
Lưu ý: Trả về kết quả hiệu chuẩn 0,90-1 cho thấy kết quả hiệu chuẩn tốt, trong khi > 1,1 hoặc < 0,9 cho thấy kết quả hiệu chuẩn kém.
3. Lưu kết quả hiệu chuẩn: Sau khi hiệu chuẩn của người dùng, quyết định có nên lưu dựa trên kết quả hiệu chuẩn hay không.
Gửi: * PA không gian GS01 không gian MCAL không gian SAVE xe trở lại
Trả lời:
* PA không gian GS01 không gian MCAL không gian SAVE không gian 0 xe trở lại thất bại
* PA không gian GS01 không gian MCAL không gian SAVE không gian 1 xe trở lại thành công
4. Kết quả hiệu chuẩn rõ ràng: Sau khi hiệu chuẩn, người dùng quyết định có nên xóa dựa trên kết quả hiệu chuẩn hay không.
Gửi: * PA không gian GS01 không gian MCAL không gian CLEAR xe trở lại
Trả lời:
* PA không gian GS01 không gian MCAL không gian CLEAR không gian 0 xe trở lại thất bại
* PA không gian GS01 không gian MCAL không gian CLEAR không gian 1 xe ngựa trở lại thành công
AỨng dụng
Xe bay thu nhỏ
• Máy bay không người lái
• Máy bay không người lái
• UAV nông nghiệp
Máy
• Satcom di chuyển (SotM)
• Máy móc xây dựng
• Giám sát tàu
Robot học
• Nông nghiệp tự trị
• Tự động hóa kho
• Vòng tay robot
Các ứng dụng khác
• Thiết bị cầm tay
• Hướng dẫn cho người đi bộ
• VR/AR và HMD
•Giúp điều hướng
Hỗ trợ và Dịch vụ:
Chào mừng bạn đến với hỗ trợ kỹ thuật và dịch vụ của chúng tôi cho cảm biến gyroscope. nhóm chuyên dụng của chúng tôi ở đây để giúp bạn với bất kỳ vấn đề kỹ thuật hoặc yêu cầu bạn có thể có liên quan đến việc sử dụng, lắp đặt,hoặc bảo trì cảm biến gyroscope của bạnChúng tôi cam kết cung cấp cho bạn sự hỗ trợ tốt nhất có thể để đảm bảo sản phẩm của bạn hoạt động tối ưu.
Hỗ trợ của chúng tôi bao gồm tài liệu sản phẩm chi tiết, câu hỏi thường gặp (FAQ) và hướng dẫn khắc phục sự cố được thiết kế để giúp bạn giải quyết các vấn đề phổ biến nhanh chóng.Đối với các vấn đề phức tạp hoặc cụ thể hơn, đội hỗ trợ kỹ thuật của chúng tôi sẵn sàng cung cấp hỗ trợ cá nhân.
Nếu bạn cần thêm sự giúp đỡ, please refer to the 'Contact Us' section of our website (contact information excluded as per request) where you can find additional resources and support channels to get in touch with our professional technical support team.
Cảm ơn bạn đã chọn cảm biến nhịp điệu điện tử của chúng tôi.
Bao bì và vận chuyển:
Bộ cảm biến vòng xoáy điện tử được đóng gói cẩn thận trong một túi chống tĩnh để đảm bảo bảo vệ chống lại điện tĩnh (ESD).nấm bọt mật độ cao, cung cấp độ hấp thụ sốc vượt trội trong quá trình vận chuyển.Hộp giấy có thương hiệu bảo vệ cảm biến khỏi các yếu tố môi trường và thiệt hại tiềm tàng trong quá trình vận chuyển.
Bên ngoài của hộp có nhãn rõ ràng với tên sản phẩm, hướng dẫn xử lý, và mã vạch để dễ dàng theo dõi.cung cấp một lớp bảo mật bổ sung.
Đối với vận chuyển, cảm biến nhịp điệu điện tử được gửi qua một dịch vụ vận chuyển đáng tin cậy để đảm bảo giao hàng kịp thời và an toàn.cung cấp sự yên tâm và bảo vệ cho khoản đầu tư của bạnThông tin theo dõi được cung cấp ngay khi gói được gửi đi, cho phép theo dõi thời gian thực của lô hàng cho đến khi nó đến đích.


 english
english
 français
français
 Deutsch
Deutsch
 Italiano
Italiano
 Русский
Русский
 Español
Español
 português
português
 Nederlandse
Nederlandse
 ελληνικά
ελληνικά
 日本語
日本語
 한국
한국
 العربية
العربية
 हिन्दी
हिन्दी
 Türkçe
Türkçe
 indonesia
indonesia
 tiếng Việt
tiếng Việt
 ไทย
ไทย
 বাংলা
বাংলা
 فارسی
فارسی
 polski
polski